2.1 Reference Systems and Reference Frames
(Note: The following text is mainly taken from Plag et al., 2009a).
As pointed out during Lecture 1, a principal goal of geodesy is to provide the means to assign coordinates to points as a function of time. Position and movement are not absolute quantities and depend on the reference frame to which they are referred. In particular, observations of any celestial body, be it natural or artificial, or of a point in the Earth system, can be used to describe the motion of this body only if the observations can be referred to a well defined coordinate system. In an ideal world, such a system could be defined through three coordinate axes, the origin, and a scale, with the axis either being fixed in space or having a known movement with respect to something else that is fixed. In the real world, the provision of an accessible coordinate system requires far more definitions, which comprise a reference system.
In the context of space geodesy, making use of natural and artificial celestial objects, there is a need for both a Celestrial Reference System (CRS) and a Terrestrial Reference System (TRS). The CRS, which is fixed in space, is required to describe the motions of galaxies, stars, the sun, planets including the Earth itself, the Moon and the satellites of other planets, and artificial satellites. Observations of points on the Earth's surface or related to the Earth's surface are often easier to relate to movements of these points if they are referred to a TRS with axes fixed in some way to the solid Earth and moving with the Earth in space.
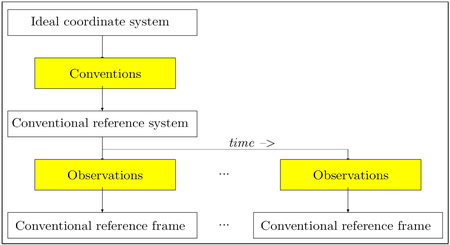
It is of obvious practical advantage to agree upon one definition for each of the celestial and terrestrial reference systems (Figure 2.1). This has led to the adoption of conventional celestial and terrestrial reference systems (CCRS and CTRS, respectively). A conventional reference system includes the specification of the origin, the direction of the axes (orientation in space), and the scale of the system in an appropriate way. However, more is needed in order to complete the system such as conventions (see Box 1 for an definition of geodetic conventions) on physical constants. The IERS defines: “By Reference System it is meant the set of prescriptions and conventions together with the modeling required to define at any time a triad of axes.”
Another issue is to gain access to such a reference system. For a celestial system, it is easy to comprehend that the axes can only be accessed indirectly. But also for the Earth, where all points on the surface are in constant movement, the axes of a terrestrial reference system cannot be realized in a simple way, for example by giving one point for each axis on the Earth surface. Therefore, these reference systems need to be made accessible through reference frames. The IERS defines: “By Reference Frame it is meant a practical realization with given fiducial directions agreeing with the concepts introduced in the Reference System.” Such practical realizations for both celestial and terrestrial systems can, for example, be achieved through the coordinates of a set of fiducial objects or points that are utilized to define the origin, axes, and scale implicitly.
Modern conventional celestial and terrestrial reference systems in fact are realized through coordinates of a set of points and objects determined from observations analyzed with appropriate mathematical and physical models. Such a realization of a reference system is denoted as reference frame. In practice, the realization of a reference system through such a frame requires continuous monitoring of the points or objects. Given the nature of the problem, any realization also requires the specification of additional boundary conditions that the reference frame should fulfill. Moreover, models used to analyze the observations and to correct for disturbances in the coordinates of the points and objects are an integral part of the realization, and therefore have to be included in the convention specifying the reference system and its realization through a frame.
It is not always clear whether the boundary conditions and models are considered as part of the conventional reference system, part of the reference frame realizing the system or the subject of an additional convention. There is certainly a trade-off between the completeness of the conventions specifying the reference system and the need to change the reference system when models or constants improve.
|
Box 1: Geodetic conventions and standards.
Convention: In the context of geodetic reference systems, convention refers to an agreement between groups, especially an international agreement, that is slightly less formal than a treaty. Conventions are for example the agreed-upon way to transform from inertial frame to terrestrial frame, splitting three unique angles that connect the two frames to a set of conventionally defined sub-group of angles (polar motion, Earth rotation, nutation and precession). In geodesy, conventions often regulate ways to process data in order to ensure comparability of the resulting products. In many cases, standards (see below) adopted by e.g. IAG/IUGG become part of conventions. For example, standards that define the “refractivity” of the atmosphere at various wavelengths adopted by IAG/IUGG are later used in “conventional” approaches of the determination of the propagation delays through the atmosphere.
Standard: In geodesy, a standard refers to an authorized model (normally authorized by IAG or IUGG or other international bodies recognized by IAG/IUGG) used to define a unit of measurement. Examples of standards are the definition of the meter, the speed of light, and similar physical constants.
|
|
Figure 2.1: Principal scheme for practically accessible coordinate systems. Starting from an ideal reference system, a set of conventions, algorithms, and constants sufficient to estimate coordinates of points in a specific ideal reference system is agreed upon. The conventional system takes into account the major applications of the reference system, the state of the art in observing techniques, the state of knowledge with respect to models, and other relevant aspects. Based on available observation techniques and analysis methods for these observations, the conventional reference system can be realized through an appropriate reference frame. The way this reference frame is to be determined normally is part of the conventions. Since realizations are based on observations with certain errors, their accuracy decrease if extrapolated in time. Therefore, reference frames need a constant monitoring and frequent readjustments. Moreover, improvements in observation techniques and the mere progress of time and length of available observations will allow for an ever better determination of the reference frame. From Plag (2006).
|
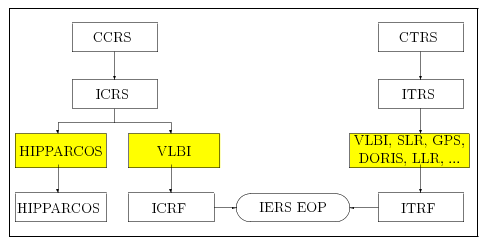
Figure 2.2 gives an overview illustrating the conventional reference systems and their realizations presently adopted by the relevant international scientific unions. The two fundamental systems accepted by the relevant international scientific bodies are the ICRS and the ITRS, which are realized by IERS through the ICRF and the ITRF, respectively. The IERS is a service under the joint auspice of IAG and IAU, and for the ICRF, both organizations take responsibility.
These two frames are linked to each other through the Earth rotation. Today, IERS provides parameters related to Earth's rotation under the name of EOP.
In addition to the above mentioned CCRS and CTRS, it is also important to mention here the need for a Conventional Dynamic Reference Frame (CDRF) that provides the planetary and lunar ephemerides in the selected ICRF. Such a frame will be derived from preferably all relevant observational data. The adjustment of the observations requires a number of astronomical constants as well as the planetary masses, and these numbers are considered an integral part of the CDRF.
 and
and  , respectively, and the orientation of the Earth around this axis through UT1-TAI as function of time. From
, respectively, and the orientation of the Earth around this axis through UT1-TAI as function of time. From